Soit
 M un tenseur d'ordre 2 définie sur une partie de
R3, alors
M se décompose en coordonnées cartésiennes :
M un tenseur d'ordre 2 définie sur une partie de
R3, alors
M se décompose en coordonnées cartésiennes :
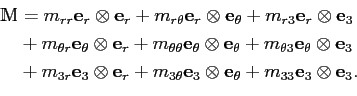
On a de même en coordonnées cylindriques
Or toutes les dérivées partielles sont nulles sauf
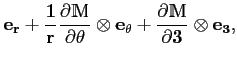
Mais le gradient est donné par
d'où on tire l'expression du gradient de
M en coordonnées
cylindriques :
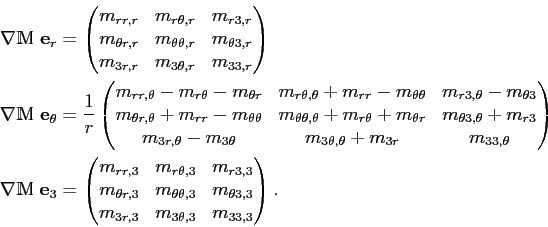
C'est à dire, de façon légèrement plus lisible ;) :
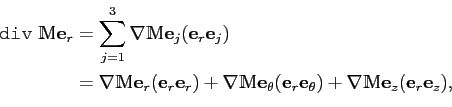
La divergence d'un tenseur est définie comme précédemment :
de même, on a :
et
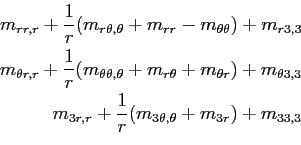
On obtient donc finalement :
Proposition 7.4.1
La divergence d'un tenseur d'ordre 2 en coordonnées cylindrique
Il peut être parfois avantageux de le récrire sous la forme suivante :
choi
2008-12-22