Sous-sections
Fonction différentiable - Application dérivée
De façon classique on la définition pour une fonction d'une variable
réelle à valeur dans
 R:
R:
On dit que f est dérivable en x0 s'il existe un réel
f′(x0) défini par
f′(
x0) =

.
Cependant, comme pour la continuité, on va adopter une autre
présentation de la définition afin de la généraliser
Définition 4.3.1
On dit que f est dérivable en x0 s'il
existe un réel
f′(x0) tel que
f (x0 + h) - f (x0) = f′(x0)h + o(h)
le ``reste'' o(h) étant négligeable dans le sens que

= 0.
On remarque que la quantité
f (x0 + h) - f (x0) s'exprime comme la
somme d'une application linéaire qui à h associe
f′(x0)h et d'un reste négligeable.
On peut donc considérer la dérivée de  au point x0 non seulement comme un réel mais également comme un opérateur linéaire
sur
R qui à h associe
f′(x0)h (en fait cette
considération a été établi à partir de la bijection naturelle entre
R et
au point x0 non seulement comme un réel mais également comme un opérateur linéaire
sur
R qui à h associe
f′(x0)h (en fait cette
considération a été établi à partir de la bijection naturelle entre
R et
 (R)).
(R)).
C'est cette définition qu'il faudra retenir. En général, les étudiants
ont beaucoup de mal à oublier la définition qu'ils ont apprise dans le
Secondaire valable uniquement pour les fonctions réelles d'une
variable réelle, et ils l'utilisent sans scrupule même s'il n'a plus
de sens comme c'est le cas pour tout les autres cas de fonctions. Il
va sans dire que ce genre d'erreurs coûte quelques points aux
examens ;-)
Considérons maintenant une fonction définie sur un intervalle
]a, b[ de
R à valeurs dans
Rm. Rappelons que
cela signifie que
 ou encore,
si on représente une base canonique de
Rm
par
{
ou encore,
si on représente une base canonique de
Rm
par
{ :
:
En un point
x0∈]a, b[, la dérivée de en x0,
noté
 , est défini comme le vecteur de
Rm (si il existe) tel que
, est défini comme le vecteur de
Rm (si il existe) tel que
Soulignons encore que l'égalité précédente est vectorielle :
et donc peut également s'écrire sous forme matricielle
dans la base canonique:
ou encore sous forme vectorielle :
Définition 4.3.2
est dérivable en x0 si et seulement si il existe un
vecteur
tel que :
La dérivée de en x0 apparaît non seulement comme un
vecteur de
Rm mais également comme une application
linéaire de
R dans
Rm qui associe à tout réel
h le vecteur
 (il s'agit là de la
bijection naturelle entre
Rm et
(Rm,R)).
(il s'agit là de la
bijection naturelle entre
Rm et
(Rm,R)).
On va maintenant généraliser ces notions.
On dit alors que
 est la
différentielle (on ne dit plus dérivée?) de en
est la
différentielle (on ne dit plus dérivée?) de en  et on également parfois
et on également parfois
Ainsi, si est différentiable sur un ouvert Ω, alors
pour tout
 ,
,
i.e. la différentielle de en est une application
linéaire de
Rn (tout entier) dans
Rm mais on
peut remarquer que
 est une application de Ω
vers
(Rn,Rm).
est une application de Ω
vers
(Rn,Rm).
Remarque 4.3.4
Pour des raisons, disons pédagogiques, nous nous sommes limités dans
le cadre de ces rappels aux fonctions définies sur des parties de
Rn à valeurs dans
Rm. Mais, tout ce qui suit
est également valable si on remplace les
Rn et
Rm par des objets ``plus abstraits'' que sont les
espaces de Banach (i.e. des espaces normés complets)
qu'on pourrait noter également E et F. Les énoncés et les
démonstrations demeurant strictement identiques.
Remarque 4.3.5
On parle également d'application tangente pour désigner la
différentielle en un point.
Théorème 4.3.6
Soit une application d'un ouvert Ω de
Rn
dans
Rm. Si est différentiable en
, alors sa différentielle est unique.
Preuve.
Supposons qu'on ait, avec
t∈R,
f (x + th) = f (x) + df1th + o(th) et f (x + th) = f (x) + df2th + o(th)
Alors on obtient en effectuant la différence:
(df1 - df2)th = o(th) = t2o(h)
d'où pour tout
t
(df1 - df2)h = to(h)
c'est à dire
(df1 - df2)h = 0

Quelques remarques
- Si est différentiable en alors est
nécessairement continue en (exercice).
- La différentielle notée
 ou
d
ou
d
 est appelée parfois dérivée totale de
en , afin de la distinguer des dérivées partielles.
est appelée parfois dérivée totale de
en , afin de la distinguer des dérivées partielles.
- Si
A∈(Rn,Rm) et si
x∈Rn alors
A′(

Autrement dit, une application linéaire est sa propre différentielle.
Remarquez que apparaît explicitement dans le premier membre
mais pas dans le second : c'est parce que la fonction dérivée d'une
application linéaire est constante (indépendance par rapport au
``point'' où on dérive.
Remarquer que le second membre est le produit de deux applications
linéaires :
 et
et
 ;
on a bien que
;
on a bien que
 .
.
Preuve.
Puisque la différentielle de en un point est une application
linéaire de
Rn vers
Rm, on peut la
représenter sous forme matricielle. Plus précisément par une matrice
n×m.
Soient
( et
(
et
( les bases canoniques des espaces
Rn et
Rm respectivement:
les bases canoniques des espaces
Rn et
Rm respectivement:
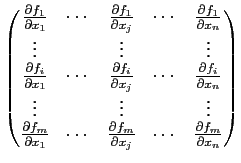
Définition 4.3.8
La représentation matricielle de la différentielle de dans
ces bases canoniques est la matrice Jacobienne. Usuellement, elle est
notée
J( ou encore
J
ou encore
J .
.
Définition 4.3.9
Soit xj la j-ème variable de
Rn, la dérivée
partielle de par rapport à xj est la dérivée de
par rapport à xj, les autres variables étant
considérées fixes. On la note :
On peut remarquer qu'on a encore

(

Proposition 4.3.10
Si est différentiable en et si
 , alors toutes les
dérivées partielles existent et
, alors toutes les
dérivées partielles existent et
Attention: la réciproque n'est pas vrai : On peut construire une
fonction dont les dérivées partielles existent et sont continues mais
qui n'est pas elle même différentiable.
On note aussi parfois :
d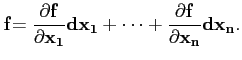
Théorème 4.3.11
La composante de la i-ème ligne et de la j-ème colonne de la
matrice Jacobienne est la dérivée partielle de la i-ème composante
de par rapport à la j-ème variable. On note :
Jij =

.
ou encore
(
J) =
.
choi
2008-12-22

 -
-  =
=  + o(h),
+ o(h),
 = 0.
= 0.